検索用語を入力
検索フォームを送信
Web
keines.gozaru.jp
www.blendernation.com
11 左足
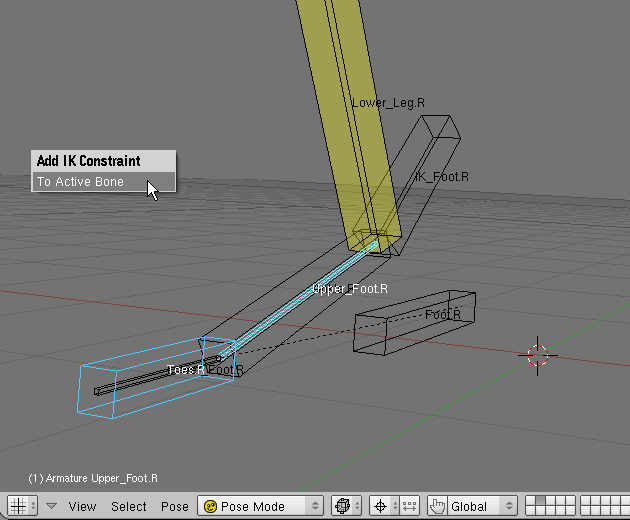
Toes.R を選択して [Shift] を押しながら Upper_Foot.R を選択します。
そして [Ctrl+I] Add IK constraint を行います。
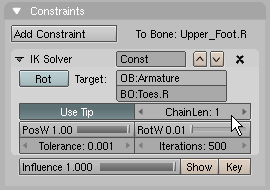
Upper_Foot.R までの距離を丁度にするために ChainLength を1に設定します。
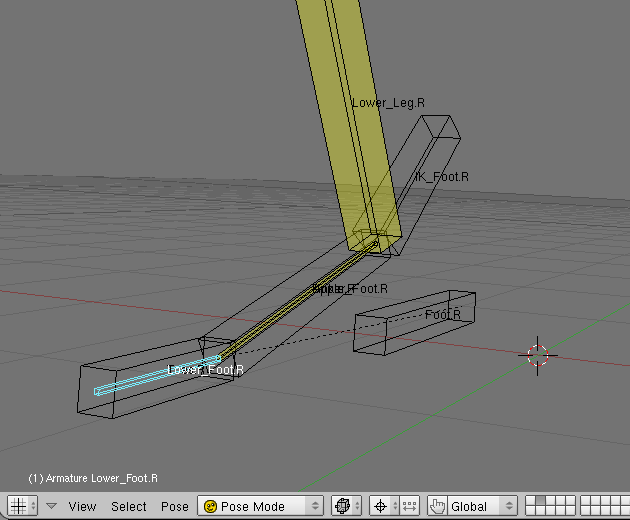
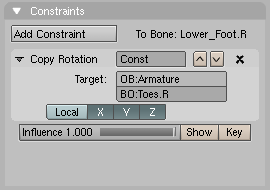
Lower_Foot.R に Editing(F9) - Constraints パネルにある Copy Rotation を設定します。
Target を Toes.R に設定します。
![[head]](../img/head.png)